Portfolio
Eric Sherman
Photos and videos loading...
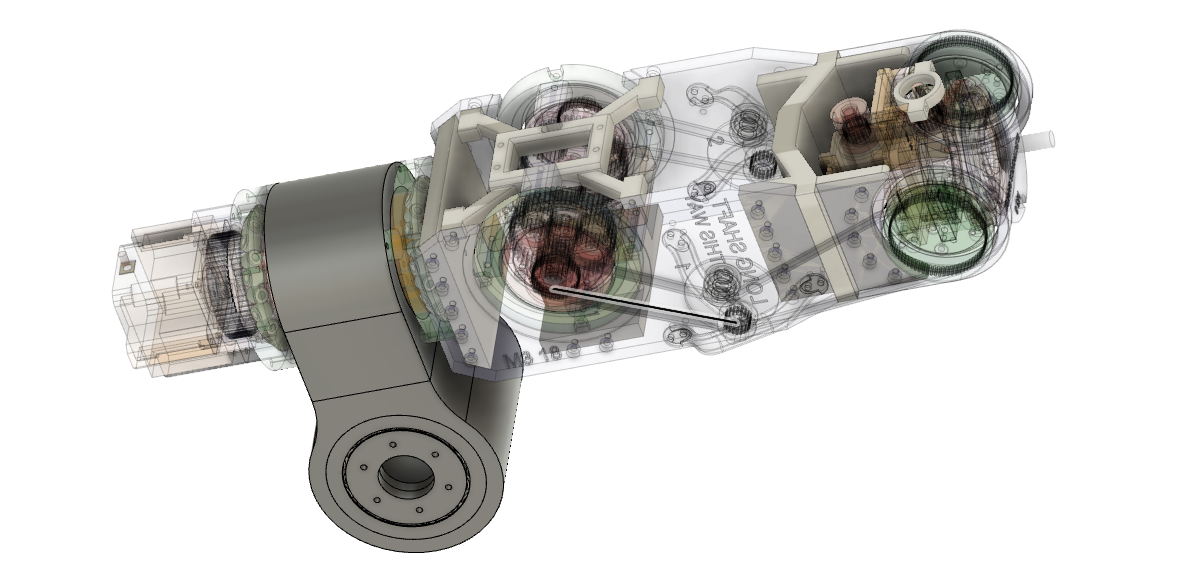
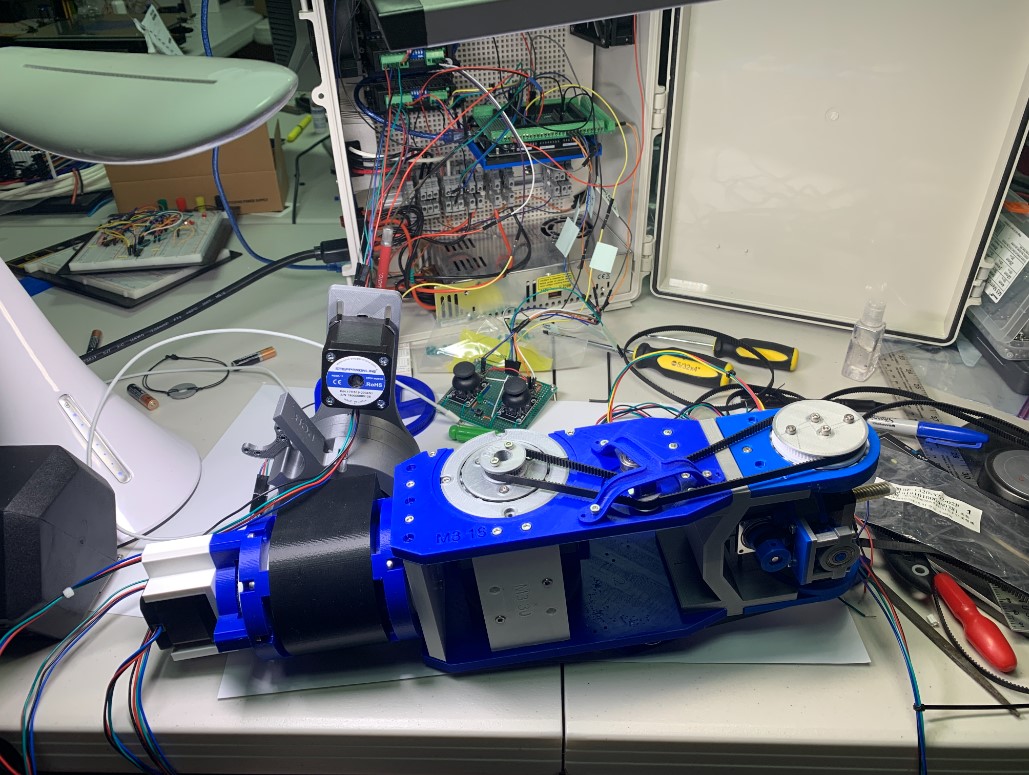
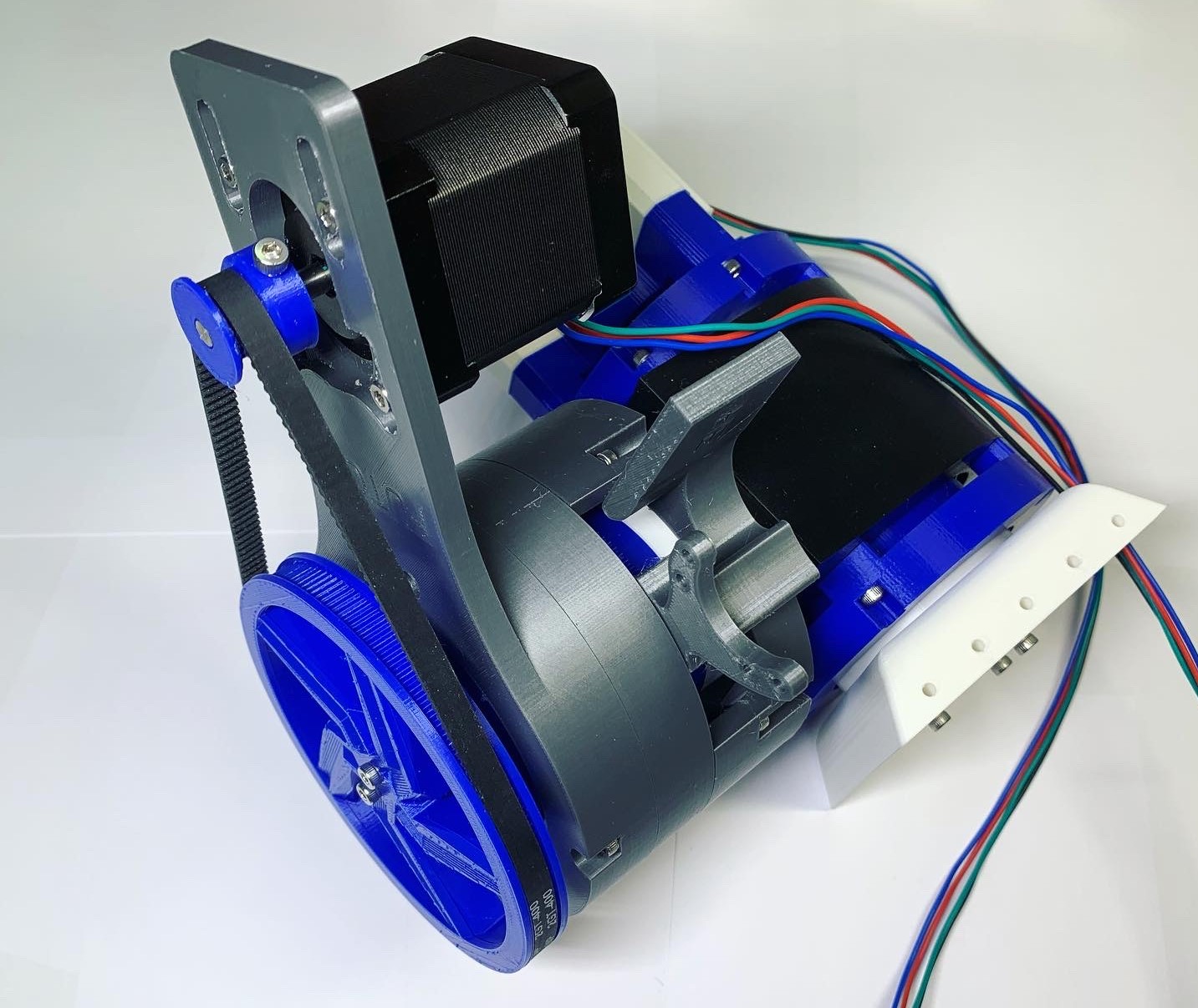
Futori Six-Axis Robot Arm
The goal of this project is to construct a 3D printed, mini-industrial robot arm with 6 degrees of freedom. This build is mechanically complex, incorporating gearboxes, stepper motors, bearings, and belt drives. On the electrical side, the project currently utilizes an Arduino Mega to control the arm but I have been considering upgrading to more powerful options such as 32 bit NXP or ST microcontrollers. I also publish progress updates to over 1900 followers on an instagram account (@electronics_garage) dedicated to this project and some of my other builds. I eventually founded a community of makers that are pursuing a similar project, where we often bounce ideas off of each other and talk lots of robotics.

Academic Projects
Features projects completed for undergraduate coursework.
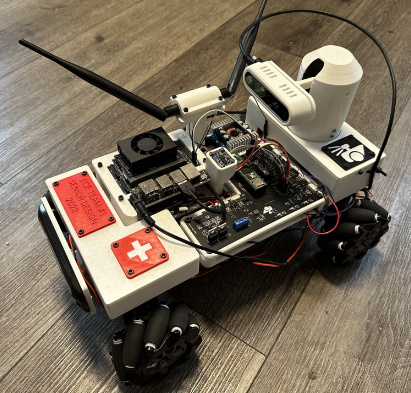
Low Cost RC Rover for Adaptive 3D Environment Mapping in Search and Rescue Operations
As part of my capstone project for computer engineering, myself and four other classmates built a low cost, remote control rover capable of generating 3D maps of unknown or dangerous locales and assist in search and rescue operations through other technology and features. Our midterm and final presentation, conceptual design report, final report, and our design expo poster can all be viewed here. While a detailed project report and personal contributions to this project are covered in the final report, a summarized version will be uploaded here soon!


Simulation of Inverted Pendulum and Controller
Final Project for Computational Modeling and Simulation (Github).
Report written in LaTeX using Overleaf.
Need for Speed Bop-It
As part of the Junior Design course, the goal of this project is to build a variation of the classic Bop-It game. Our team of 3 created a racing themed version of the game that had a total of five unique actions: Steer right, steer left, shift, use the turn signal, and honk. My responsibilities included: mechanical design including fabrication of the enclosure, steering wheel and horn, the shifter, and mounting of electrical hardware; layout, routing, and assembly of the PCB; and lastly, full system integration.
Traffic Intersection Simulator
This individual project (also part of the Junior Design course) focused on simulating a 4-way traffic intersection, complete with traffic lights and an army of Cybertrucks. Each car is running a modified PID controller that was borrowed from a research paper and then modified to fit the needs of the project. With the controller, the cars accelerate and decelerate similar to how a normal vehicle would in traffic. Each vehicle can respond correctly to the car in front of it and to the traffic light. A detailed report, complete with many video demonstrations and the source code, can be found on the project's Github page.
Minecraft Carry Look-Ahead Adder
Extra Credit Project for Digital Circuits and Systems
Robotics and Automation Society
Features work done under the Robotics and Automation Society at Pitt.
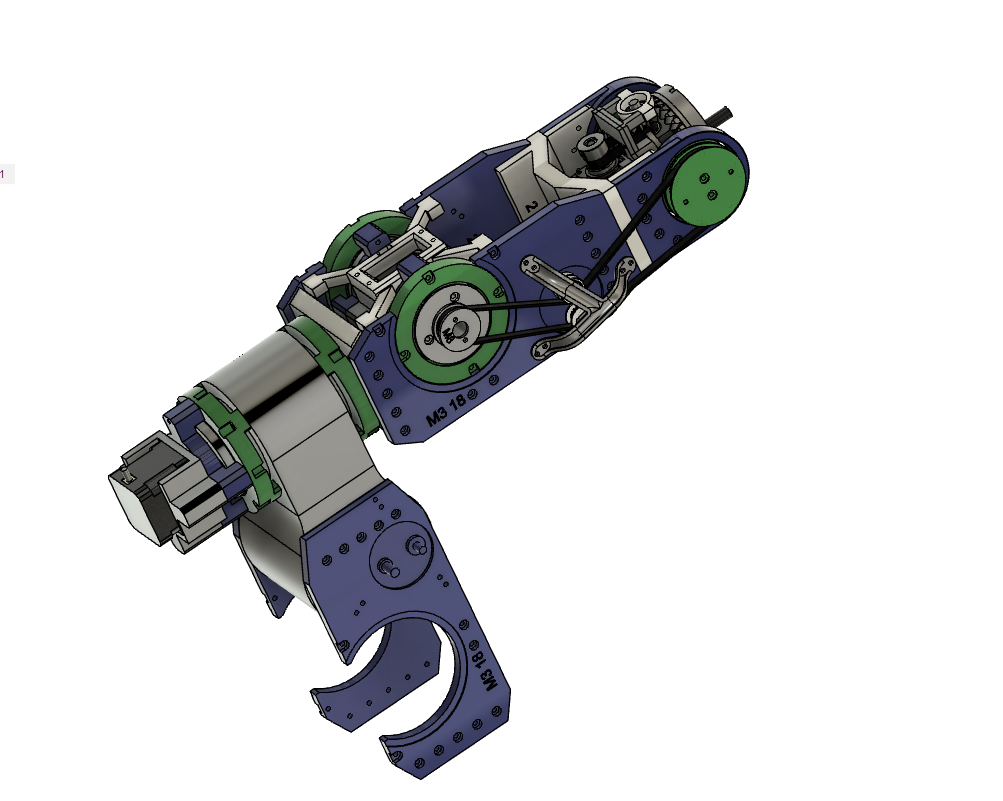
Three-Axis Robot Arm
In order to teach robotics to people who are newer to the field, the three-axis robot arm was born as a platform that can be used to accelerate this process by having something fun and engaging to work and interact with. The video below shows the robot arm designed in Fusion 360 and animated to create some basic grabbing motion. The design of the arm was borrowed from this YouTube video however the base and the carriage were redesigned to decrease 3D printing time, minimize parts, and improve the motion of the linear axis. This robot platform was then opened to the robotics club so that others could come with project ideas that improve and build upon what we had so far. Some of these projects include implementing inverse kinematics, integrating and interacting with the robot in VR, computer vision tracking, and controlling the robot using gestures.
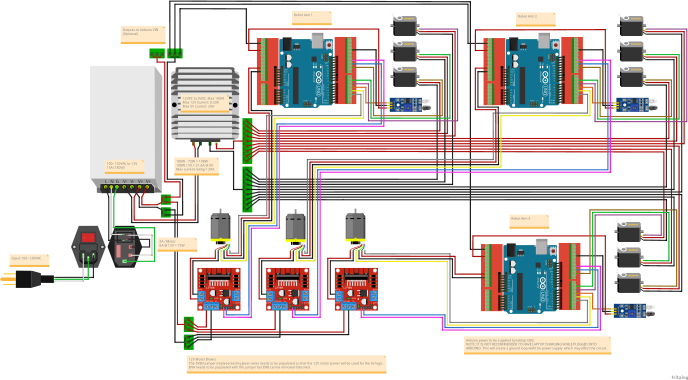
In addition to the arm design, a complete electrical system was designed that is capable of powering 3 robot arms simultaneously. A higher resolution picture of the schematics below (created in Fritzing) is available on our Github.
Hackathons and Design Expos
Closed-Loop Stepper Motor
Project for NSF SHREC - Summer Undergraduate Research Group
TartanHacks Hackathon
At Carnegie Mellon University in 2019, my team was awarded the ScottyLab's Grand Prize ($2000) for designing and building a text-to-braille converter in under 24 hours. You can see more about the project and video demonstration here.